2004年,美国一个名叫DARPA的自动驾驶挑战赛,拉开了智能驾驶的帷幕。

5年后谷歌的Robotaxi更是将这股风吹向了全球。
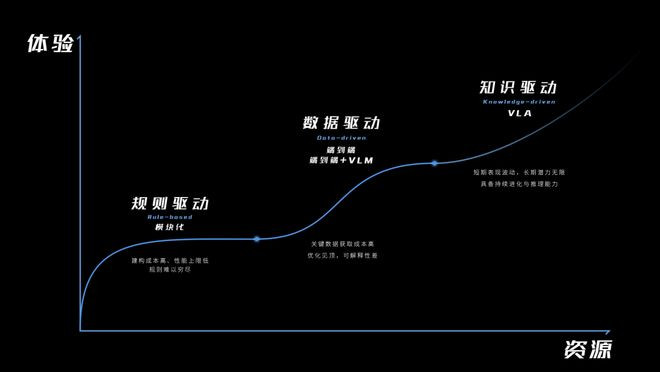
但早期的辅助驾驶就像一个只会按照固定指令行动的机器人,只能处理它学过的东西,没学过的就只能宕机。
而随着近年来端到端从理论到实践的突破,实现了类人化的学习后,咱们明显感觉到辅助驾驶一天一个样。
其发展速度,比我冬天穿秋裤还快。
前两年大伙还天天说的高精地图,今年基本上都没啥消息了。而去年脖子哥刚给大伙做了个端到端的科普视频,才没几个月就过了气。
到了今年,为了能应对更多复杂场景和具备相关的推理能力,各家车企开始向VLA(Vision-Language-Action)和世界模型(WA)转变,动作快的,已经准备上车落地了。
这不,在刚刚结束的广州车展上,长城就率先发布了VLA大模型。
今天,长城汽车的CTO吴会肖还与影视飓风的Tim体验了搭载VLA大模型的魏牌全新蓝山智能进阶版,并来了一场VLATalk。

不得不说,听两个网感强的人说话就是舒服,他们向咱们展示了长城汽车最新一代辅助驾驶系统CPMaster“听得懂、看得见、会思考”几个核心能力,用简单易懂的语言解释清楚了VLA的底层逻辑是什么——用视觉观察世界,用语言认知世界,用动作塑造和改变世界。
看完之后,脖子哥觉得以后值得关注的辅助驾驶系统又多了一个。
其实吧,咱们去年阴差阳错之下,开了整整一个月的魏牌全新蓝山,旅游、跑高速出差、搬家都干过,也算是长测了第三代的CoffeePilotUltra辅助驾驶系统。
所以这次长城全新一代的CPMaster辅助驾驶系统给我的感受是又有了明显的提升。

而更重要的是,在强调辅助驾驶上限的当下,长城这套VLA同时也更关注“下限”,他们对“安全”有些独特的理解,这是真值得拿出来说道说道。
话不多说,咱们先来看看长城的VLA有哪些直观的体验。
首先,感知比较明显的就是现在可以语音控车了。
在直播中,Tim上车寒暄过后,驾驶员就喊出语音助手“小魏同学”,原地激活了NOA,车子便自己开了起来。

在后面的试驾中,他们还实现了语音控制变道、车速、跟车距离等等我们平时需要手动设置的指令。
在广州车展发布会的演示视频中,还能通过语音控制靠边停车。

但其实语音控车也只是开胃菜。VLA大模型的魅力在于“L”这个语义给模型带来的逻辑思考能力,也就是发布会宣传的“看得见、会思考”,咱们可以结合场景来看一下。
这里左转快完成了,前方车辆提速离开,而右侧小车从后方快速加速上来,旁边人行道还有探头想汇入的车辆。
但是右侧小车稍微偏左,且没有打转向灯。。。
VLA通过联想,判断右侧车辆可能嫌前车慢,而且有汇入车辆的风险。最终选择了防御性驾驶,减速礼让右侧的小车先过了。

还有更难的,双向两车道,右侧全是违停车,路口也没红绿灯,非常经典的老城区路况。
这里也是很有节目效果,车子快到斑马线的时候,右侧突然出现一个外卖小哥,也不看路就开着电瓶车冲了出来。
再过十来米,右侧原本停得好好的小车,不打转向灯直接跨两车道和双黄线掉头。

而VLA明显都预判到了,车机上的卡片写着“路口行人穿行,右方为静止车”。同时还将车辆的盲区标注出一个“Spot热力点”,也就是将神经网络的Attention机制可视化了。
最终,车辆进行了防御性驾驶,控制了速度,避免了事故的发生。
其实这要是咱们老司机可能就备个刹车的事,嘴上再喷两句;但开车的如果是个新手,真慌起来什么结果不好说。

所以,这就是VLA对潜在风险的理解,拥有了像老司机一样的判断力。
其实还有更极限的。
在VLATalk上有这么一段演示,前方是施工路段,直接将双车道占了一条半。车子大概提前五十米就识别到,之后开始变道并减速,从64km/h一直降到20km/h。
但VLA理解施工路段之后,没待在原车道上,而是借了一点非机动车道来通行。

而准备走出施工路段前,诶,还缓了一下,真的很像老司机躬身看看A柱盲区。
长城后来还给出了像雨天、碎石山路、农村单车道这些特殊场景VLA的应对表现。视频里能够看出来,车子能从下雨联想到路滑,碎石联想到障碍、坑洼颠簸。

这里的每一次减速慢行,都能体现全新一代的CPMaster对世界环境的理解。
有点儿遗憾的是今天保定的天气不错......直播里晴空万里,这些特殊场景的实测只能等下一次了。
总的来说,长城的这套CPMaster系统在VLA的加持下显的尤为丝滑。
这种丝滑的表现,正是长城要坚持做VLA的原因:只有AI开始理解世界,它们才能知道什么是人类的“害怕”,在辅助驾驶过程中才能实现“拟人”。

不过众所周知,AI是个黑盒,很多时候得有一个窗口让我们去理解AI才更让人放心。
这个问题,长城也想到了,我们前面在车机左侧看到的那一长串的,就是新推出的CoT思维链卡片。

上面直接给出当前场景的图片,配上车子自己的分析,与驾驶员进行交互,让大伙明白车子在想啥,才能建立起双方的信任。
然后再辅以更新后的SR(SENSEREALITY)画面:当车子作出防御性驾驶的时候,原本NOH蓝色的行车轨迹就会变成紫色。这样整个人机共驾界面就变得更加清晰了。

到这,咱们就将本次长城VLA明面上的革新说完了。
不知道大伙怎么看,其实我挺喜欢这个CoT思维链的卡片的。
毕竟AI令人害怕的不是做不到,而是理解不了它这个黑盒在想什么。咱们也经历过明明SR显示了红灯,但车子还是闯了过去的情况,啪的一下6分没了,欲哭无泪。
现在咱们能知道AI是怎么想的,自然也就更方便完成人机共驾的操作了。

在上面这些案例里,脖子哥能感受到长城在细节上做了很多人性化的优化,这其实就是长城CTO吴会肖与Tim聊天中提到的:对用户需求的真实洞察,就是他们技术前进的方向。

顺着话题的推进,他们也解释了长城在实现用户需求时,对技术路线的思考。
就好比在大伙为VLA和世界模型谁才是无人驾驶的终极路线吵得火热的时候,长城认为这俩其实并不冲突,甚至可以两条腿走路,相辅相成。
比如VLA在实际的训练中需要高质量的数据,世界模型就特别适合解决这个问题。
在虚拟世界里,各种逆天的案例想怎么模拟都行:比如你要右转,但右侧有个婚车队,还打着双闪,AI对双闪和“车队”如何认知,这就是一个极端案例的训练。

最终VLA和世界模型,一个云端赋能,一个车端平稳运行,一同为用户用车安全铺平道路,何乐而不为呢?
所以,不知道大伙发现了没?
长城对于辅助驾驶的关注点,不仅仅放在操作的丝滑与极限上,它最终的落脚点其实都是用户的安全和体验。
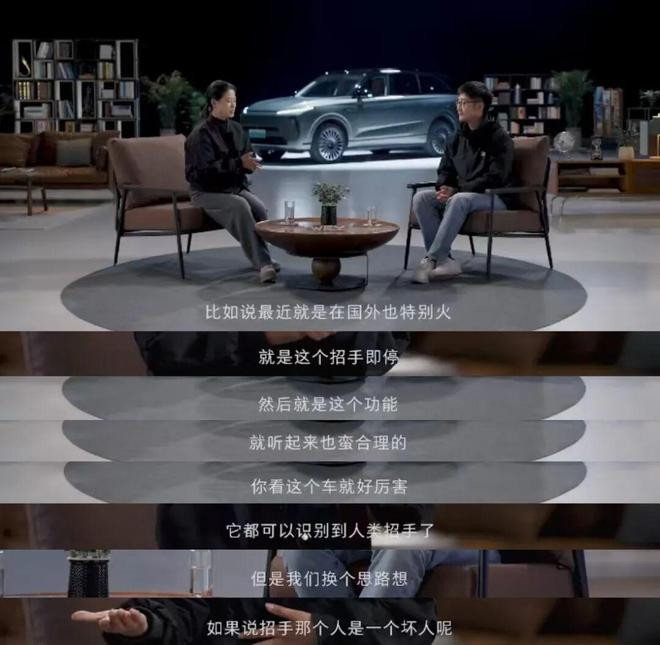
为此他们甚至可以牺牲一点前沿的体验,比如放弃之前某些国外的车展示过的“招手即停”功能。因为长城担心这个功能可能会被人利用,所以为了车主的安全他们并没有上线。
在这样的前提下,CTO吴会肖也说得很实在,他们确实希望这套系统是第一。但这个第一不是和各家的排名,而是安全和体验第一。

其实我们溯源长城他们造车的这些日子,就能看出他们的技术思路一直都是这样“稳中求进”。
根据吴会肖的自述,长城十几年前就在做主动安全的人员中,筛选了一批专家开始做辅助驾驶。
2021年的时候,纯燃油的魏牌摩卡就已经有城区NOH的视频流出,但长城为了安全,还是只上了高速NOH。

而那几年,正是各家疯狂说辅助驾驶开城的时候,比到最后,都发现效果不太理想,最终纷纷集体跳票。
到了最近这两年,才逐渐实现了全国都能开。
但这也远还没到终点,时不时来一次的辅助驾驶事故,也仍在提醒着我们,辅助驾驶智能化上过于激进,最后还是会被打回原形。
毕竟现阶段还是辅助驾驶,既然还是人来担责,那车子就一定要安全。

不过说那么多,技术终究只是技术,实际还是得试到车,横向对比下才知道咋样。
但不得不承认,长城这种有的放矢的“谨慎”,在当下无疑是最对车主负责的办法。
就像整个VLATalk中长城汽车CTO吴会肖反复提及的:
长城是一家会“害怕”的公司。
早年间长城在造皮卡、造越野车、造SUV的时候就坚持“安全无差别”的原则,标配气囊、ABS等功能。
要知道,那可是ESP都能被吹的年代,各种安全性配置都得加钱的。
而长城这种刻在骨子里的安全基因,让他们在做VLA大模型的时候,维持住了这种稳健的克制。

研发VLA不难吗?难,CTO吴会肖也认为当初他们踏上这条无图的方案有“赌”的成分。
但无图方案、以及现在的VLA大模型,就是能给用户带来更优质的体验。
所以,即使难也要做。
而这种对长期主义的追求,对用户的维护。。。
好像,在长城造车这35年里,已经被验证了无数遍了。
撰文:ARO
经营杠杆的定义提示:文章来自网络,不代表本站观点。